The Kalman Filter is a mathematical algorithm used for estimating and predicting the state of a dynamic system, particularly in the presence of noisy or uncertain data. It consist of five equations.
Expectation: The mean of multiple measurements, similar with mean
Variance:
Standard Variance:
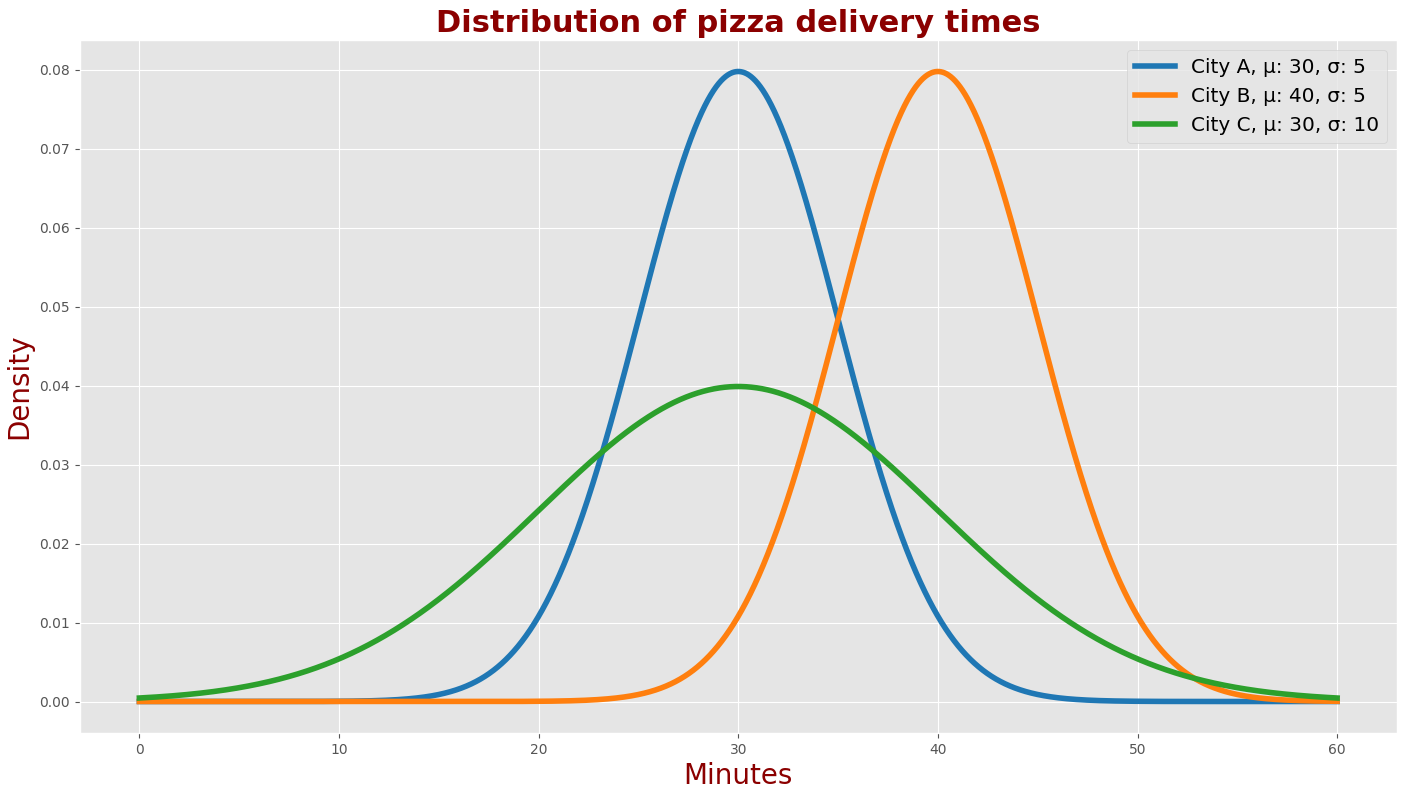
Normal Distribution (All called Gaussian Distribution) Typically, measurement errors are normally distributed. The Kalman filter assumes that the measurement errors have a normal distribution.
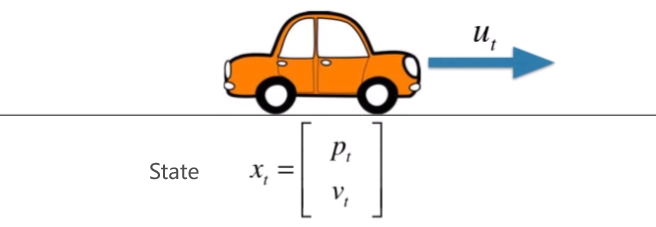
Estimation: An estimate of the hidden state of the system.
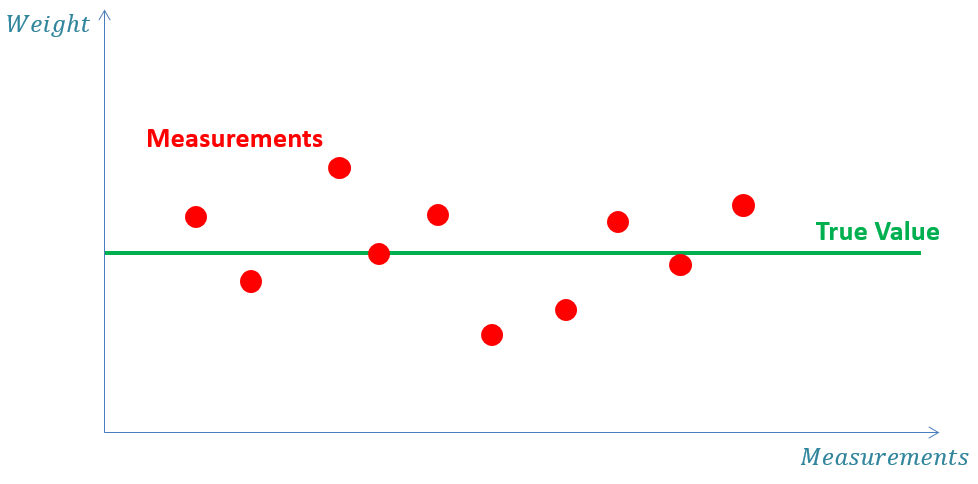
Accuracy: Describes how close a measured value is to the true value.
Precision: Describes the deviation distribution of a series of measured values relative to the same true value
Info
High-precision systems have measurements with very low variance (i.e., low uncertainty), while low-precision systems have high variance (i.e., high uncertainty).
Info
Typically, measurement errors are normally distributed. The Kalman filter assumes that the measurement errors have a normal distribution.
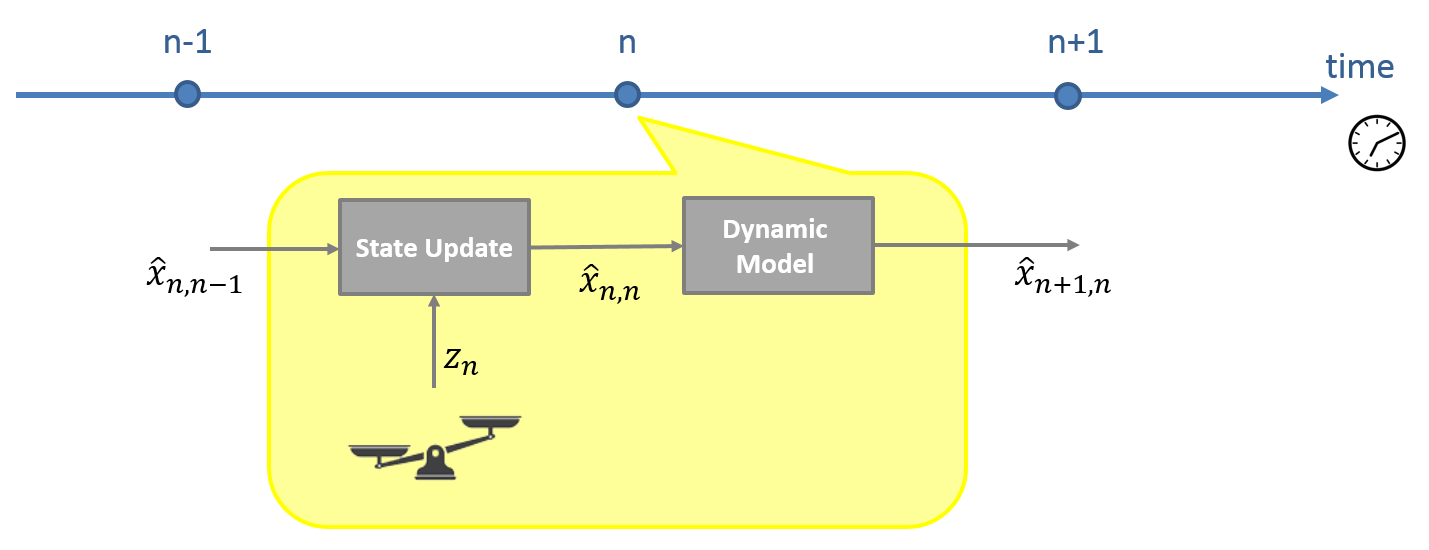
: The true weight of the gold. : The measurement of gold. : The estimation of using the measurement at n moment. : It is the prediction of the future state (time ) at time , recorded as , or extrapolation. : The estimated value of at time , using the measured value at time . : Apriori estimate - a prediction of the system state at time n at time n−1 (Annotation: for the time, is a priori estimate, is prediction)
In order to estimate , we need to store all historical measurements, which is very expensive on memory. And every time a new measurement value is obtained, the calculation needs to be completely restarted from the first measurement, which also consumes a huge amount of CPU computing power. A more realistic consideration is that it is best to only store the estimated value of the previous moment, and simply update it after new measurements are completed.
Formula
Meaning
The mean of measurement
The orange item is the estimation at time n-1
The final formula
The final formula is the status update equation. One of five equations of Kalman filter.

 Project - Kalman Filter (Discard)
Project - Kalman Filter (Discard)